


|
|
|
1.2 Kinematičke
veličine krivocrtnog gibanja broda
Gibanje broda u manevru smatrati će
se ravninskim gibanjem krutog tijela u horizontalnoj ravnini. Slika 1.2 prikazuje kinematičke veličine takvog
gibanja broda.
Koordinatni sustav ( xG, yG, zG ) je inercijalni nepomični koordinatni sustav
vezan za Zemljin globalni koordinatni sustav. Ishodište sustava OG smješta se na slobodnu površinu vode, os xG usmjerena je prema sjeveru, os yG prema istoku, a os zG je vertikalna i usmjerena prema dnu.
Koordinatni sustav ( x0, y0 i z0
) je vezan za okolnu tekućinu i pomiče
se spram prethodnog koordinatnog sustava zbog gibanja vode - morske
struje. U početnom trenutku vremena t = 0 oba koordinatna sustava se
poklapaju. Kod razmatranja svojstava upravljivosti broda, brzina morske struje
se redovito smatra prostorno i vremenski konstantim vektorom, ![]()
Ishodište brodskog koordinatnog
sustava ( x, y, z ) smješteno je u
vertikalnoj ravnini simetrije broda. Položaj ishodišta sustava po visini i
duljini broda je proizvoljan. Uzdužna os
x pozitivna je u smjeru pramca, pozitivan polupravac poprečne
osi y ide preko desnog boka broda, a pozitivan
polupravac vertikalne osi z
usmjeren je prema dnu.
Kut Y, tj. kut između pozitivnih osi
xG i x,
mjeren od xG prema x
u pozitivnom smjeru rotacije oko osi zG,
naziva se kursom broda.
Brzina broda preko dna ![]() jednaka je
vektorskom zbroju brzine morske struje i brzine broda kroz vodu
jednaka je
vektorskom zbroju brzine morske struje i brzine broda kroz vodu ![]() = ( u, v,
w ). Vertikalna komponenta brzine
gibanja broda w se kod prikaza kinematičkih značajki gibanja
broda u manevru uvijek zanemaruje. Prema tome, u daljnjem tekstu će se
pretpostavljati w = 0.
= ( u, v,
w ). Vertikalna komponenta brzine
gibanja broda w se kod prikaza kinematičkih značajki gibanja
broda u manevru uvijek zanemaruje. Prema tome, u daljnjem tekstu će se
pretpostavljati w = 0.
Treba razlikovati kurs broda Y
od kuta napredovanja broda J, koji se mjeri između pozitivne osi xG i vektora brzine broda preko dna ![]() . Ova dva kuta su jednaka samo u specijalnom slučaju
ravnocrtnog gibanja broda bez zanošenja i to u akvatoriju bez morske struje.
(Svi uređaji za praćenje putanje broda mjere i prikazuju kut napredovanja - ne
kursa broda).
. Ova dva kuta su jednaka samo u specijalnom slučaju
ravnocrtnog gibanja broda bez zanošenja i to u akvatoriju bez morske struje.
(Svi uređaji za praćenje putanje broda mjere i prikazuju kut napredovanja - ne
kursa broda).
Kut napredovanja broda kroz vodu b , pod nazivom kut zanošenja
broda, ima vrlo veliku ulogu u hidrodinamičkoj teoriji upravljivosti broda. Kut
zanošenja b i polumjer zakrivljenosti putanje (kroz vodu) R
predstavljaju dva osnovna parametra opisa gibanja broda po zakrivljenoj
putanji.
Na slici 1.2 prikazan je i
vektor kutne brzine broda ![]() = ( p, q,
r ). U području upravljivosti se utjecaji brzine
valjanja p i brzine posrtanja q, kao oscilatorna gibanja, zanemaruju.
Prema tome, u nastavku će se koristiti samo kutna brzina oko vertikalne osi
= ( p, q,
r ). U području upravljivosti se utjecaji brzine
valjanja p i brzine posrtanja q, kao oscilatorna gibanja, zanemaruju.
Prema tome, u nastavku će se koristiti samo kutna brzina oko vertikalne osi ![]() .
.
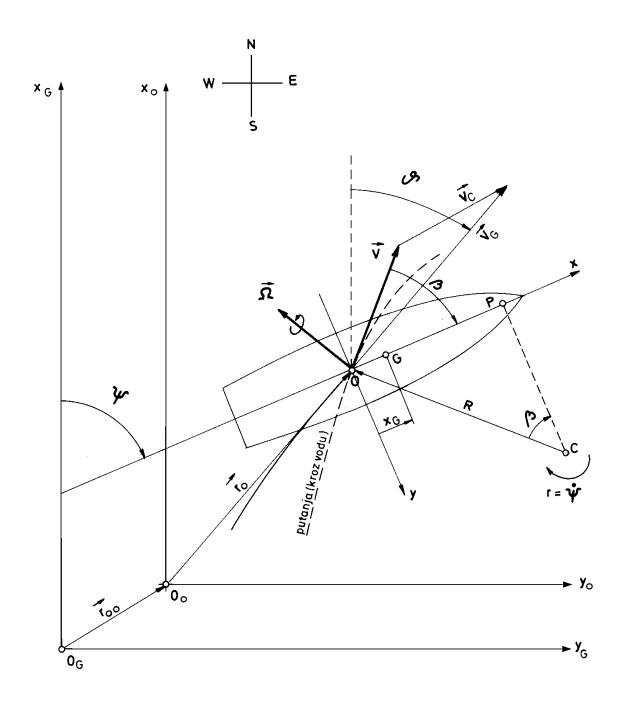
Slika 1.2 Koordinatni
sustavi i kinematičke veličine krivocrtnog gibanja broda
Dakle, na brodu se kutna brzina r manifestira kao brzina promjene kursa broda te se na taj način se
može jednostavno odrediti iz izmjerenog kursa na bazi vremena:
r
= dy(t)
/ dt
Treba
primjetiti da su veličine polumjera kruženja R i kuta zanošenja b
svake točke broda (x, y) različite, tj. R = R(x, y) i b=b (x, y). Na slici 1.3 prikazani su vektori brzina u
tri karakteristične točke broda, O=ishodište, G=težiše, R=os kormila.
Sl. 1.3 Polumjer
kruženja i kut zanošenja karakterističnih točaka broda
Kod
manevara pri srednjim i većim brzinama plovidbe kut zanošenja u centru broda
kreće se do 30o (ponekad i
do 40o ). Za razliku od toga, kod manevara pri niskim brzinama
plovidbe kut zanošenja nije ograničen. Slika 1.4 prikazuje elementarna gibanja
broda pri malim brzinama plovidbe.
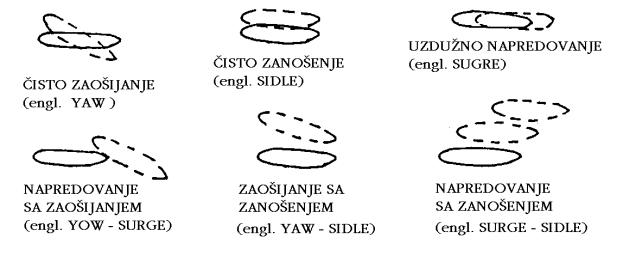
Sl. 1.4 Gibanja
broda s malim brzinama napredovanja
(manevar u luci primjenom poprečnih sila)