


|
|
|
2. JEDNADŽBE GIBANJA I SILE U SUSTAVU TRUP-VIJAK-KORMILO
2.1 Jednadžbe gibanja i
pridružene mase
2.1.1 Koordinatni sustavi i transformacije
koordinata
Inercijalni
koordinatni sustav O0 x0 y0 z0
je nepomični pravokutni koordinatni sustav,
x0 horizontalna
koordinatna os usmjerena prema sjeveru,
y0 horizontalna
koordinatna os usmjerena prema istoku,
z0 vertikalna
koordinatna os usmjerena prema centru Zemlje.
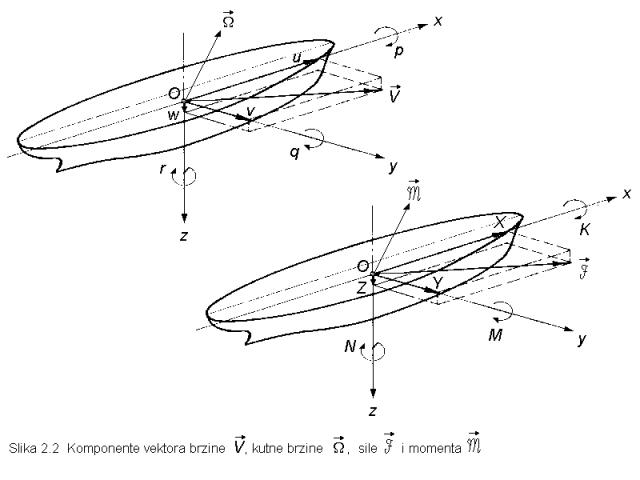
Brodski
koordinatni sustav O x y z je
pravokutni koordinatni sustav kruto vezan za brod. Položaj ishodišta brodskog
koordinatnog sustava O na brodu je, općenito, proizvoljan.
Uobičajeno je, me|utim, da se za ravnine koordinatnog sustava izabiru slijedeće
tri karakteristične, me|usobno okomite, ravnine:
Oxy horizontalna ravnina
projektne vodne linije broda
Oyz vertikalna ravnina glavnog
rebra
Ozx vertikalna ravnina
uzdužne simetrije broda
U tom slučaju se
koordinatne osiju nazivaju:
x uzdužnom,
pozitivno usmjerenom prema prmcu,
y poprečnom,
pozitivno usmjerenom preko desnog boka,
z vertikalnom,
pozitivno usmjerenom prema dnu.
Položaj i
orjentacija brodskog koordinatnog sustava
O x y z
spram inercijalnog O0 x0 y0 z0
jednoznačno se mogu opisati pomoću slijedeće četiri veličine:
![]() radijvektor brodskog koordinatnog
sustava
radijvektor brodskog koordinatnog
sustava
j kut
bočnog nagiba broda (ili kut valjanja) je nagib broda oko uzdužne osi x
q kut
trima broda (ili kut posrtanja) je nagib broda oko poprečne osi y
y kut
kursa broda (ili kut zaošijanja) je kut uzdužnice broda mjeren od pravca
sjevera

Transformacija brodskog koordinatnog sustava u inercijalni odre|ena je vektorskom jednadžbom:
![]()
gdje su:
![]() koordinate proizvoljne točke u
brodskom koordinatnom sustavu
koordinate proizvoljne točke u
brodskom koordinatnom sustavu
![]() koordinate te iste točke u inercijalnom
koordinatnom sustavu
koordinate te iste točke u inercijalnom
koordinatnom sustavu
![]() koordinate ishodišta brodskog koordinatnog
sustava
koordinate ishodišta brodskog koordinatnog
sustava
U matričnom
obliku jednadžba transformacije ima oblik:
gdje je ![]() ortogonalna matrica
transformacije:
ortogonalna matrica
transformacije:

Inverzna
transformacija:
![]() ,
,
provodi se pomoću
izraza:
gdje je ![]() transponirana matrica
transponirana matrica ![]() .
.
2.1.2 Brzina i ubrzanje proizvoljne točke broda
Gibanje broda može se smatrati
superpozicijom translacije ishodišta O brzinom
![]() i rotacije oko ishodišta kutnom brzinom
i rotacije oko ishodišta kutnom brzinom ![]() .
.
Ako se točka broda u brodskom koordinatnom
sustavu nalazi na koordinati![]() , u inercijalnom sustavu radijvektor točke će biti:
, u inercijalnom sustavu radijvektor točke će biti:
![]()
Derivacijom ovog izraza po vremenu dobiva se:
![]()
Lijeva strana ove jednadžbe predstavlja brzinu translacije točke gledane iz inercijalnog koordinatnog sustava:
![]()
Prvi član na desnoj strani predstavlja brzinu translacije ishodišta brodskog koordinatnog sustava gledanog iz inercijalnog koordinatnog sustava:
![]()
Budući da je radijvektor točke gledan iz
brodskog koordinatnog sustava ![]() vremenski
nepromjenjiva vektorska veličina, njegova derivacija po vremenu nastaje samo
zbog rotacije brodskog koordinatnog sustava spram inercijalnog, pa vrijedi:
vremenski
nepromjenjiva vektorska veličina, njegova derivacija po vremenu nastaje samo
zbog rotacije brodskog koordinatnog sustava spram inercijalnog, pa vrijedi:
![]()
Prema tome, brzina točke broda u inercijalnom koordinatnom sustavu odre|ena je izrazom:
![]()
Ubrzanje točke
dobiva se deriviranjem brzine po vremenu:
ili
![]()
gdje su:
![]() ubrzanje točke broda gledano iz
inercijalnog koordinatnog sustava i
ubrzanje točke broda gledano iz
inercijalnog koordinatnog sustava i
![]() ubrzanja
ishodišta brodskog koordinatnog sustava.
ubrzanja
ishodišta brodskog koordinatnog sustava.
Jednadžbe za brzinu i ubrzanje u matričnom obliku poprimaju oblik:

što nakon sre|ivanja daje:

2.1.3 Opće jednadžbe gibanja broda
Gibanje broda pod
djelovanjem sila ![]() i momenata
i momenata ![]() opisuje se jednadžbama:
opisuje se jednadžbama:
gdje su:
![]() ubrzanje
točke broda
ubrzanje
točke broda
![]() radijvektor
točke broda
radijvektor
točke broda
U matričnom obliku jednadadžbe gibanja glase:
Uvrštenjem prethodno izvedenog izraza za ubrzanje:
dobiva se:


Korištenjem supstitucija:
|
|
|
|
|
|
|
|
|
|
|
|
gdje su:
![]() masa
broda
masa
broda
![]() radijvektor težišta broda
radijvektor težišta broda
nakon integracije
dobiva se 6 općih jednadžbi gibanja broda kao krutog tijela:

Ako je brod simetričan na koordinatnu
ravninu Oxz, vrijedi ![]() , pa se gornje jednadžbe pojednostavljuju na oblik:
, pa se gornje jednadžbe pojednostavljuju na oblik:

Ako se za ishodište brodskog koordinatnog
sustava izabere težište broda,![]() , jednadžbe poprimaju još jednostavniji oblik:
, jednadžbe poprimaju još jednostavniji oblik:
2.1.4 Jednadžbe gibanja broda u horizontalnoj ravnini
Pretpostavke:
1. Brod je simetričan na koordinatnu ravninu Oxz, pa vrijedi
![]()
2. Utjecaj vertikalnih gibanja na horizontalna je zanemariv, pa se može staviti:
![]()
Uvrštenjem u opće jednadžbe gibanja dobiva se:
![]()
![]()
Ako se za ishodište brodskog koordinatnog
sustava izabere težište broda,![]() , jednadžbe poprimaju još jednostavniji oblik:
, jednadžbe poprimaju još jednostavniji oblik:
![]()
![]()
2.1.5 Pridružene mase
Odre|ivanje inercijalnih hidrodinamičkih sila koje djeluju na brod provodi se uz pretpostavku potencijalnog strujanja u neograničenoj, nestlačivoj, idealnoj tekućini.
Neka je ![]() potencijal strujanja
takav da zadovoljava slijedeće uvjete:
potencijal strujanja
takav da zadovoljava slijedeće uvjete:
1) Laplaceovu jednadžbu (kontinuiteta):
![]()
2) Uvjet isčezavanja u beskonačnosti:
![]()
3) Uvjet nepromočivosti stjenke broda S
![]() na
S
na
S
gdje je ![]() jedinični vektor normale na stijenku S.
jedinični vektor normale na stijenku S.
Zbog linearnosti
uvjeta slijedi da potencijal ima oblik sume potencijala komponentalnih gibanja:
![]()
Svaki pojedinačni
potencijal zadovoljava sva tri navedena uvjeta.
Uvjeti nepromočivosti elementarnih potencijala imaju oblik:
Budući da desne strane gornjih izraza ne ovise o vremenu, slijedi da niti lijeve strane ne mogu biti funkcije vremena. Prema tome, potencijali elementarnih gibanja ovise samo o obliku trupa broda.
Ako se uvedu slijedeće oznake:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
potencijal poprima oblik:
![]()
Kinetička energija idealne, nestlačive tekućine u potencijalnom strujanju odre|ena je površinskim integralom:
![]()
Uvrštenjem potencijala u ovu jednadžbu može se dobiti:
![]()
ili
![]()
gdje je:
![]()
tzv matrica pridruženih masa.
U općem slučaju, matrica pridruženih masa
sadrži 36 različitih veličina ovisnih o obliku tijela, obliku granica tekućine
i načinu gibanja trijela. U slučaju gibanja tijela u neograničenoj tekućini
matrica je dijagonalno simetrična, ![]() , pa se pojednostavljuje na 21 različiti član. Sva plovila su
gotovo redovito simetrična spram uzdužne vertikalne ravnine O x
z. U tom slučaju 18 članova matrice poprima vrijednost
nula, pa se matrica pridruženih masa za gibanje tijela u neograničenoj tekućini
svodi na 12 različitih članova, a izraz za kinetičku energiju poprima oblik:
, pa se pojednostavljuje na 21 različiti član. Sva plovila su
gotovo redovito simetrična spram uzdužne vertikalne ravnine O x
z. U tom slučaju 18 članova matrice poprima vrijednost
nula, pa se matrica pridruženih masa za gibanje tijela u neograničenoj tekućini
svodi na 12 različitih članova, a izraz za kinetičku energiju poprima oblik:

Poznato je da se projekcije vektora količine gibnja mogu dobiti deriviranjem kinetičke energije po odgovarajućim komponentama brzine:
 i = 1, 2, 3
i = 1, 2, 3
Projekcije vektora momenta količine gibnja mogu se dobiti deriviranjem kinetičke energije po odgovarajućim komponentama kutne brzine:
![]() i = 4,
5, 6
i = 4,
5, 6
Inercijalna sila kojim tekućina djeluje na trup, prema zakonu količine gibanja iznosi:
![]()
Inercijalni moment odre|uje se prema zakonu količine momenta gibanja:
![]()
Pri gibanju tijela s vertikalnom uzdužnom simetrijom u neograničenoj tekućini, za komponente inercijalne sile i momenta mogu se dobiti slijedeći izrazi:
![]()
![]()
![]()
![]()

![]()
Dobivene jednadžbe koriste se za odre|ivanje inercijalnih sila kod analiza gibanja duboko uronjenih podvodnih plovila u dubokoj vodi (ili zrakoplova dovoljno udaljenih od tla).
Kod analiza gibanja površinskih brodova u manevru utjecaj slobodne površine na inercijalne sile se redovito zanemaruje. Zbog toga se neporemećena slobodna površina vode može smatrati ravninom simetrije tzv. udvojenog trupa, a gibanje broda gibanjem udvojenog trupa u neograničenoj tekućini. Za gibanje takvog trupa u gornje jednadžbe se može uvrstiti:
![]()
pa se za inercijalne sile kod gibanja površinskog broda dobivaju slijedeći izrazi:
![]()
![]()
![]()
![]()
![]()
![]()
Za analize kod kojih se gibanje broda može smatrati ravninskim gibanjem u horizontalnoj ravnini, tj.:
![]()
dobivaju se slijedeće 3 jednadžbe:
![]()
![]()
![]()
2.1.6 Kvazistacionarne jednadžbe gibanja broda u horizontalnoj ravnini
Sile na desnim stranama jednadžbi gibanja broda u horizontalnoj ravnini (izvedene u 2.1.4):
![]()
![]()
mogu se, bez gubitka na općenitosti, prikazati u obliku suma inercijalnih i preostalih komponenata:
pa će, nakon uvrštenja izraza za inercijalne sile (iz 2.1.5), jednadžbe gibanja poprimiti oblik:
![]()
![]()
![]()
Nakon sre|ivanja
se dobiva:
Uvo|enjem supstitucija:
dobiva se
konačno:
Kada bi se u gornjim jednadnadžve uvrstilo ![]() dobile bi se opće
jednadžbe ravninskog gibanja dvostruko simetričnog krutog tijela pod
djelovanjem sila
dobile bi se opće
jednadžbe ravninskog gibanja dvostruko simetričnog krutog tijela pod
djelovanjem sila ![]() i
i ![]() te momenta
te momenta ![]() .
.
Prema tome, inercijalne hidrodinamičke sile
koje nastaju zbog gibanja tijela u vodi djeloju na tijelo tako kao da
povećavaju inercijalne značajke njegove mase. Zbog toga se veličine ![]() nazivaju pridruženim
ili dodatnim masama.
nazivaju pridruženim
ili dodatnim masama.
Kako su, sada, inercijalne komponente
prebačene na lijevu stranu jednadžbi gibanja, na desnim stranama su ostale sve druge sile neinercijalnog
porjekla. Drugim riječima, desne strane dobivenih jednadžbi gibanja ne ovise
eksplicite o ubrzanjima ![]() ,
, ![]() i
i ![]() .
.
Prema tome, veličina sila![]() i
i ![]() te momenta
te momenta ![]() u nekom trenutku t ovist će, izme|u ostaloga,
o trenutnim vrijednostima komponentata brzina u, v i r, neovisno o tome kako su postignute, i
jednake su onim veličinama sila i momenta koje bi djelovale na brod pri
njegovom ustaljenom (stacionarnom) kruženju istim tim brzinama.
u nekom trenutku t ovist će, izme|u ostaloga,
o trenutnim vrijednostima komponentata brzina u, v i r, neovisno o tome kako su postignute, i
jednake su onim veličinama sila i momenta koje bi djelovale na brod pri
njegovom ustaljenom (stacionarnom) kruženju istim tim brzinama.
Ovaj zaključak je, naravno, valjan u okvirima teorijskih pretpostavki. U realnim uvjetima desne strane izvedenih jednadžbi gibanja ovise i o ubrzanjima. Iskustvo pokazuje, me|utim, da su preostale inercijalne hidrodinamičke komponente sila klasičnih površinskih brodova vrlo male u odnosu na inercijalne sile mase broda i inercijalne sile pridruženih masa.
Zbog toga, a s ciljem mogućnosti rješavanja dobivenih diferencijalnih jednadžbi, uvodi se hipoteza kvazistacionarnosti koja pretpostavlja da su trenutne vrijednosti svih preostalih hidrodinamičkih sila jednake onima koje bi djelovale na brod da je u stacionarnom kruženju. Dobivene jednadžbe se stoga nazivaju kvazistacionarnim jednadžbama gibanja broda.
2.1.7 Odre|ivanje pridruženih masa
Za proračun pridruženih masa po izvedenim formulama potrebno prvo proračunati potencijale strujanja oko broda. Budući da je proračun potencijala strujanja oko broda kao trodimenzionalnog tijela često nepraktičan pristup, za odreživanje pridruženih masa koriste se slijedeći praktični postupci:
1. proračun pomoću empirijskih formula
2.
proračun
približnim metodama
3.
modelska
ispitivanja
Empirijskie
formule treba vrlo oprezano koristiti. Uvijek treba provjeriti za koji su tip
trupa broda i koje područje omjera glavnih dimenzija broda su razmatrane
formule dobivene.
Najčešće
korištena približna metoda je metoda kriški s empirijskim korekcijama.
Pridružene mase trodimenzionalnog trupa broda računaju se integracijom
dvodimenzionalnih pridruženih masa presjeka preko duljine broda po formulama:
gdje je ![]() pridružena masa zanošenja beskonačno
dugačkog cilindra čiji je poprečni presjek jednak poprečnom presjeku broda na
koordinati x. Za odre|ivanje
dvodimenzionalnih pridruženih masa koriste se jednostavniji teorijski postupci.
U praksi se često stvarni brodski presjeci zamjenjuju geometrijski
ekvivalentnim matematičkim formama (npr. Lewisove
forme) za koje postoje i tablice pridruženih masa.
pridružena masa zanošenja beskonačno
dugačkog cilindra čiji je poprečni presjek jednak poprečnom presjeku broda na
koordinati x. Za odre|ivanje
dvodimenzionalnih pridruženih masa koriste se jednostavniji teorijski postupci.
U praksi se često stvarni brodski presjeci zamjenjuju geometrijski
ekvivalentnim matematičkim formama (npr. Lewisove
forme) za koje postoje i tablice pridruženih masa.
Koeficijenti ![]() i
i ![]() su iskustveni
ispravci zbog trodimenzionalnosti trupa. Prema Pabstu:
su iskustveni
ispravci zbog trodimenzionalnosti trupa. Prema Pabstu:

![]()
Metodom kriški dobivaju se pouzdaniji
podaci od empirijskih formula, no nije moguće izračunati priduženu masu za
uzdužno ubrzano gibanje broda ![]() .
.
Eksperimentalno odre|ivanje pridruženih masa broda danas se najčešće provodi ispitivanjem modela broda na ure|aju za prisilno oscilatormo gibanje modela PMM (Planar Motion Mechanism).
PMM se sastoji od dva oscilatora, od kojih
jedan proizvodi poprečne oscilacije na pramcu, a drugi poprečne oscilacije na
krmi, dok se model tegli konstantnom brzinom u0. (Indeks 0 govori da se radi o komponenti
brzine inercijalnom koordinatnom sustavu).
Dva
dinamometra postavljena u točkama B i S, mjere poprečne sile YS i YB potrebne za prisilno oscilatorno gibanja
modela.
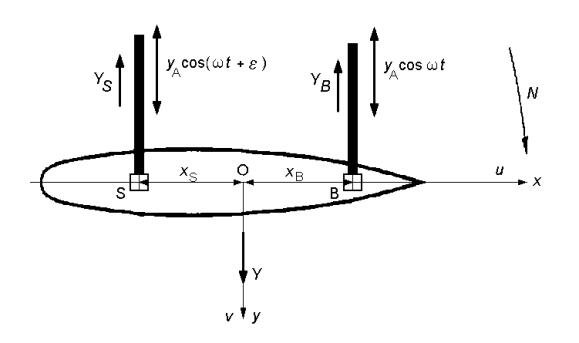
Slika 2.3 Shema ispitivanja modela na PMM
Sile
koje djeluju na model u ravnoteži su sa silama prisilnog vo|enja modela, pa
vrijedi:
![]()
Pomoću
mehanizma model se prisilno dovodi u poznato stanje gibanja. Dakle, prilikom
ispitivanja poznate su
1.
vremenske funkcije komponenata ravninskog gibanja modela: u(t), v(t) i r(t)
2.
vremenske funkcije sila: X(t), Y(t), N(t)
3.
inercijalne karakteristike modela: m, Izz, xG
Uvrštenjem ovih funkcija u jednadžbe gibanja broda u
horizontalnoj ravnini:
mogu se dobiti
nepoznate konstante: m11, m22, m26, m66,
a iz njih, na
kraju, pridružene mase: ![]()
Ako se pokus
provede tako da se model dovede u jednostavno harmonijsko gibanje po
sinusoidalnom zakonu jednadžbe gibanja postaju jednostavne funkcije iz kojih se
nepoznate konstante mogu odrediti analitički. Na slici 2.4 shematski su
prikazana dva najvažnija tipa pokusa: gibanje modela bez zaošijanja (r = 0) i
gibanje modela bez zanošenja (v = 0) .
Oscilatorno
gibanje mora imati velike amplitude pomaka (zastajkivanja, zanošenja ili
zaošijanja) i velike periode gibanja kako bi se smanjio utjecaj generiranja
valova na slobodnoj površini.
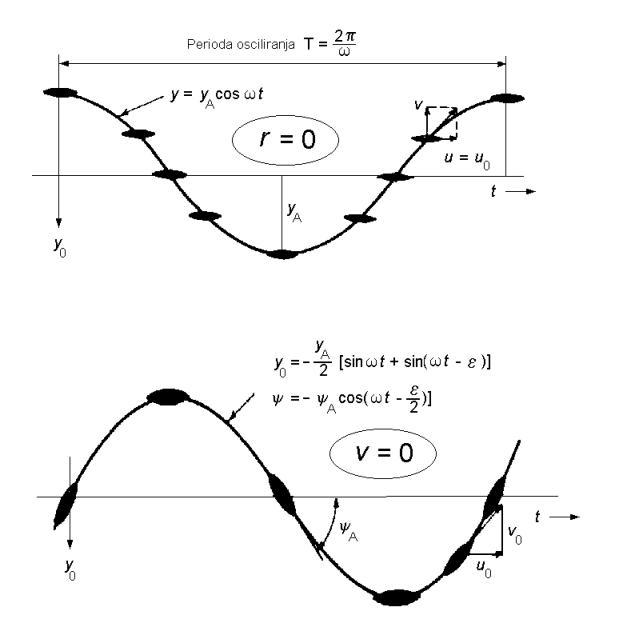
Slika 2.4 Oscilatorno gibanje modela pri ispitivanju na PMM
gore: zanošenje bez zaošijanja
dolje: zaošijanje bez zanošenja