


|
|
|
4 LINEARNA TEORIJA UPRAVLJIVOSTI
4.1 Izvod lineariziranih jednadžbi gibanja
Linearna teorija kormilarenja brodom razmatra
gibanja broda s malim odstupanjima od plovidbe u ravnome kursu, tj. gibanja kod
kojih svi kinematički parametri gibanja broda variraju oko odgovarajućih
vrijednosti ravnocrtnog gibanja, u=u0, v
= 0 , r = 0, Dy = 0,
... Takvo gibanje postiže se kratkotrajnim primjenama malih kuteva otklona
kormila d, naizmjenično na obje strane.
U tom se slučaju sile na desnoj strani jednadžbi
gibanja
![]() (4.1)
(4.1)
![]()
mogu
napisati u linearnom obliku:
 (4.2)
(4.2)
gdje
su indeksima simbolično označene parcijalne derivacije hidrodinamičkih sila (X, Y,
N ) koje djeluju na brod:
 (4.3)
(4.3)
![]()
Uvrštenjem
lineariziranih izraza za sile (4.2) u jednadžbe gibanja (4.1), nakon
zanemarivanja nelinearnih članova (vr, r2), uvrštenja u=u0,
te sređivanja, dobiva se:
 (4.4)
(4.4)
Kut
otklona kormila d smatra se nadalje zadanom vremenskom funkcijom ![]() . Može se uočiti da prva jednadžba nije spregnuta s druge
dvije, te da druge dvije jednadžbe čine sustav linearnih jednadžbi s dviju
nezavisnih varijabli (v, r ) prvoga reda:
. Može se uočiti da prva jednadžba nije spregnuta s druge
dvije, te da druge dvije jednadžbe čine sustav linearnih jednadžbi s dviju
nezavisnih varijabli (v, r ) prvoga reda:
![]() (4.5)
(4.5)
Ovakav
sustav je moguće riješiti po obje nezavisne varijable i pretvoriti ga u sustav
nespregnutih linearanih jednadžbi drugoga reda oblika:
![]()
![]() (4.6)
(4.6)
gdje su T1,
T2, T3, T4, K i H konstante ovisne o hidrodinamičkim
značajkama broda:
 (4.7)
(4.7)
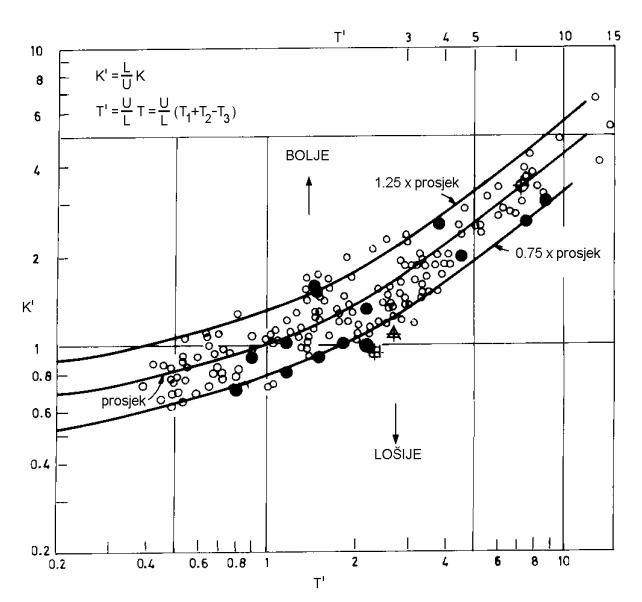
Dijagram 4.1 Bezdimenzionalni ![]() dijagram postojećih
brodova
dijagram postojećih
brodova